Jak jsme již uvedli, ve stereometrii nebývalo příliš obvyklé řešit konstrukční úlohy. Ty se obvykle řeší při deskriptivní geometrii, kde žáci řešení rýsují. Pokud při stereometrii řešíme úlohy pouze teoreticky, uvedením postupu konstrukce, nemají žáci zpětnou vazbu, nemohou se na sestrojený objekt podívat a tím ověřit, je-li jejich řešení správné, má-li skutečně požadované vlastnosti. Takové úlohy je jistě možné řešit v systémech CAD, jejich nástroje se však liší od abstraktních nástrojů školských. Systémy dynamické geometrie jsou pro řešení takových úloh ideálním prostředkem.
Pro učitele deskriptivní geometrie může být částečným zklamáním či překvapením skutečnost, že klasické deskriptivářské úlohy (např. konstrukce roviny kolmé k přímce apod.) bývají zařazeny v systémech dynamické geometrie jako základní nástroj. To však nemůžeme považovat za nevýhodu systému. Jednak lze příslušný nástroj dočasně skrýt a úlohu řešit klasickými nástroji, které zastupují pravítko a kružítko, jednak přímé využití zmíněných nástrojů umožňuje přejít přímo k zajímavějším a složitějším konstrukcím.
Chceme zdůraznit, že pro přímou práci v hodině se hodí pouze jednodušší úlohy. Tím míníme nejen úlohy jednoduché myšlenkově, použitými úvahami a jednoznačností výsledného řešení. Máme na mysli jednoduchost ve smyslu počtu kroků – tj. počtu příkazů systému, které jsou třeba pro sestrojení odpovědi (objektu, který je výsledkem zadaného úkolu). Dalším měřítkem (ne)přehlednosti scény je míra překrývání konstruovaných objektů.1
Snazší konstrukční úlohy jsme zařadili do této kapitoly, mnohé z úloh navržených v dalším textu, zejména v Kapitole 6, však výše uvedené kritérium nesplňují. Takové úlohy je možné využít pro delší samostatnou práci pro vybrané pokročilejší žáky (zatímco se učitel individuálně věnuje těm pomalejším či méně zběhlým v práci se systémem), k demonstraci vztahu mezi zadanými prvky a výsledným objektem v hotovém modelu a případně pro samostatnou domácí práci žáků. Je na učiteli, aby posoudil vhodnost zařazení té které konstrukční úlohy, třeba i na základě posouzení hotového modelu. Jako orientační vodítko může sloužit označení obtížnosti uvedené v tabulce modelů v Příloze A.
Jednoduché a hezké konstrukční úlohy obsahuje učebnice [16] v kapitole 34. Dodatek o konstrukčních úlohách v prostoru, úlohy jsou na stranách 248–249, učebnice [3] – Díl II., část Stereometrie a mnohé učebnice deskriptivní geometrie.
Základní vztahy útvarů v prostoru procvičí i následující úlohy (podle [3] a [13]).
Pro seznámení s pojmy a pro objasnění základních prostorových vztahů můžeme na úvod vyřešit několik základních, jednodušších úloh.
Figure 4.1: Úloha 1
Řešení: Uvedeme pouze návod. Po krátké úvaze žáci zajisté dojdou k závěru, že zadané přímky musí být navzájem kolmé, jinak úloha nemá řešení. Další – hledaná – hrana krychle je k oběma daným přímkám kolmá a její přímka je protíná. Sestrojíme ji tedy jako nejkratší příčku daných mimoběžek (jako úsečku). Úloha má 4 řešení. (model zadání a řešení krychl10, krychl11, obr. 4.3)
Poznámka: Jak se změní řešení úlohy, budou-li zadané přímky různoběžné resp. rovnoběžné? Bude mít úloha konečný počet řešení?
Figure 4.3: Příklad 4
Poznámka: Jedno možné řešení najdete v modelu hranol1. Pokud prohlížíme řešení, můžeme jednak zobrazit zápis konstrukce (z panelu nástrojů nebo F7), jednak zapnout trasování (přehrávání) kroků konstrukce (z panelu nástrojů nebo F11). Při přehrávání se objevují všechny sestrojené prvky ve své konečné grafické podobě. To znamená, že konstrukci pomocných objektů, které jsme nakonec skryli, aby nerušily výsledný objekt, při přehrávání neuvidíme. Zapneme si proto alespoň volbu Zobrazit skryté objekty. V našem příkladu jsme pomocné objekty neskrývali.
Při tvorbě modelů určených pro konstrukci žákům bývá vhodné upevnit zadávající prvky. V uvedeném modelu jsme tak učinili. Chcete-li modifikovat zadání, zobrazte skryté objekty, vyznačte upevněné objekty a uvolněte je (vše pomocí příkazů z menu).
Figure 4.5: Úloha 6
Poznámka: Zadání úloh 7 a 8 je převzato z [22], úloha 5.19. Úlohu najdeme – podobně jako mnoho jiných úloh, které zde uvádíme – také ve [3]. Modely: zadání – vepskr0, řešení – vepskr1, obrázek 4.6.
Čtyřstěn jako speciální případ jehlanu zaslouží samostatnou pozornost.
Řešení: Takový čtyřstěn může mít například všechny zmíněné středy v rovině ABC, jeden z nich je střed kružnice opsané danému trojúhelníku ABC a další tři musí ležet na jeho stranách – a tudíž ve středech těchto stran. Hledaný vrchol je společným bodem tří kulových ploch nad průměry AB, BC, AC. Výsledný čtyřstěn má právě tři stěny pravoúhlé trojúhelníky (modely pravo0, pravo – řešení). Další příklad čtyřstěnu, který splňuje zadání, je čtyřstěn, v němž středy dvou opsaných kružnic splynou. (model strrov)
K odvození podmínky pro existenci ortocentra uvádíme následující tři úlohy.
Řešení: Přímka BV je kolmá na rovinu ACD. Umíme tedy sestrojit rovinu ACD. Stejně je přímka AV kolmá na rovinu BCD a umíme sestrojit rovinu BCD. Hrana CD musí ležet na jejich průsečnici. Zvolíme-li libovolně jeden z jejích vrcholů – např. C, zopakujeme předchozí úvahu a sestrojíme rovinu ABD kolmou na přímku CV. Pro každou volbu bodu C najdeme jediný vrchol D a tudíž jediný čtyřstěn ABCD. Všimneme si, že v ortocentrickém čtyřstěnu jsou všechny dvojice protějších hran dvojicemi kolmých mimoběžek Je-li totiž DV ⊥ ACD a zároveň AV ⊥ BCD, je CD ⊥ AVD a tudíž je i CD ⊥ AD. Pro ostatní dvojice protilehlých hran ukážeme podmínku analogicky. Rozmyslete si, že platí i obrácené tvrzení: jsou-li přímky v každé dvojici protějších hran navzájem kolmé, je čtyřstěn ortocentrický. (model ortho11)
Poznámka: Řešení snadno plyne z odvozené nutné podmínky kolmosti protilehlých hran. (model ortho21)
Řešení: I toto řešení bezprostředně plyne z uvedeného kritéria. Víme (podle vět o kolmosti přímek a rovin), že hrana AD leží v rovině kolmé ke hraně BC, hrana BD v rovině kolmé ke hraně AC, hrana CD v rovině kolmé ke hraně AB a bod D tudíž kdekoliv na jejich společné průsečnici (kromě paty kolmice v rovině ABC). (model ortho31).
K témuž výsledku dojdeme i jinou úvahou: Pokud průsečík výšek existuje, musí být nejen přímka VD kolmá k dané rovině ABC, ale zároveň i přímka VC kolmá k rovině ABD a tedy i k přímce AB. Přímka VC a tudíž i bod V leží tedy v rovině vedené bodem C kolmo k přímce AB. Opakování úvahy pro další vrcholy vede k závěru, že přímka VD je kolmice k rovině ABC vedená ortocentrem V1 tohoto trojúhelníku. Vrchol D (nebo bod V) na ní můžeme zvolit libovolně mimo bod V1.
Konstrukce na závěr – antihranol
Úlohy této podkapitoly využívají znalostí o množinách bodů v prostoru, jimž se věnuje podkapitola 4.4. Do samostatné podkapitoly jsme je vyčlenili jen pro jejich formulaci – jde o úlohy o kulové ploše – nikoli proto, že by na ně úlohy kapitoly 4.4 navazovaly.
Ve starších učebnicích deskriptivní geometrie najdeme konstrukční úlohy o kulové ploše, které cvičí nejen vlastnosti promítacích metod, ale také základní stereometrické vztahy. Učebnice [10] uvádí také následující dvě úlohy (upraveno).
Figure 4.7: Úloha 2
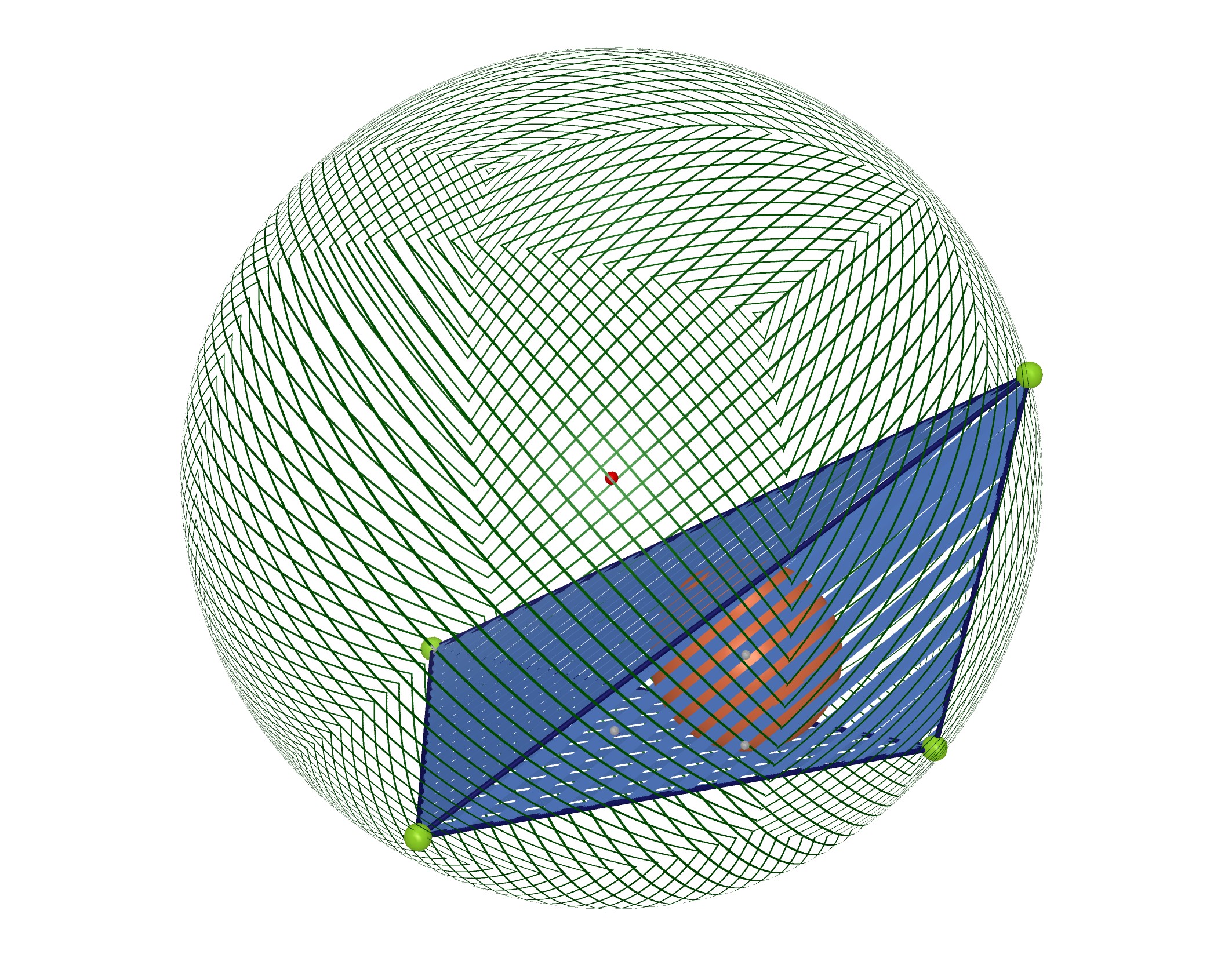
Řešení: Pokud dané tři body neleží v přímce, leží na nějaké kružnici plochy a na přímce p vedené středem této kružnice kolmo na její rovinu leží střed kulové plochy. (Zmíněná přímka je také průsečnicí rovin souměrnosti dvojic daných bodů.) Střed je průsečíkem roviny vedené bodem T kolmo k přímce t s přímkou p (model dvaBp, obr. 4.8). Pro AB ∥ t úloha nemá řešení, nebo má nekonečně mnoho řešení.
Figure 4.9: Úloha 4
Přestože ve výsledných modelech uvádíme i model obe, v němž jsou obě kulové plochy (obr. 4.10), sestrojíme každou do samostatného modelu (viz modely opsana a vepsana). Kromě změti překrývajících se rovin bychom se potýkali i se skrýváním a zobrazováním vnitřní kulové plochy nebo ji museli vybírat pomocí zápisu konstrukce.
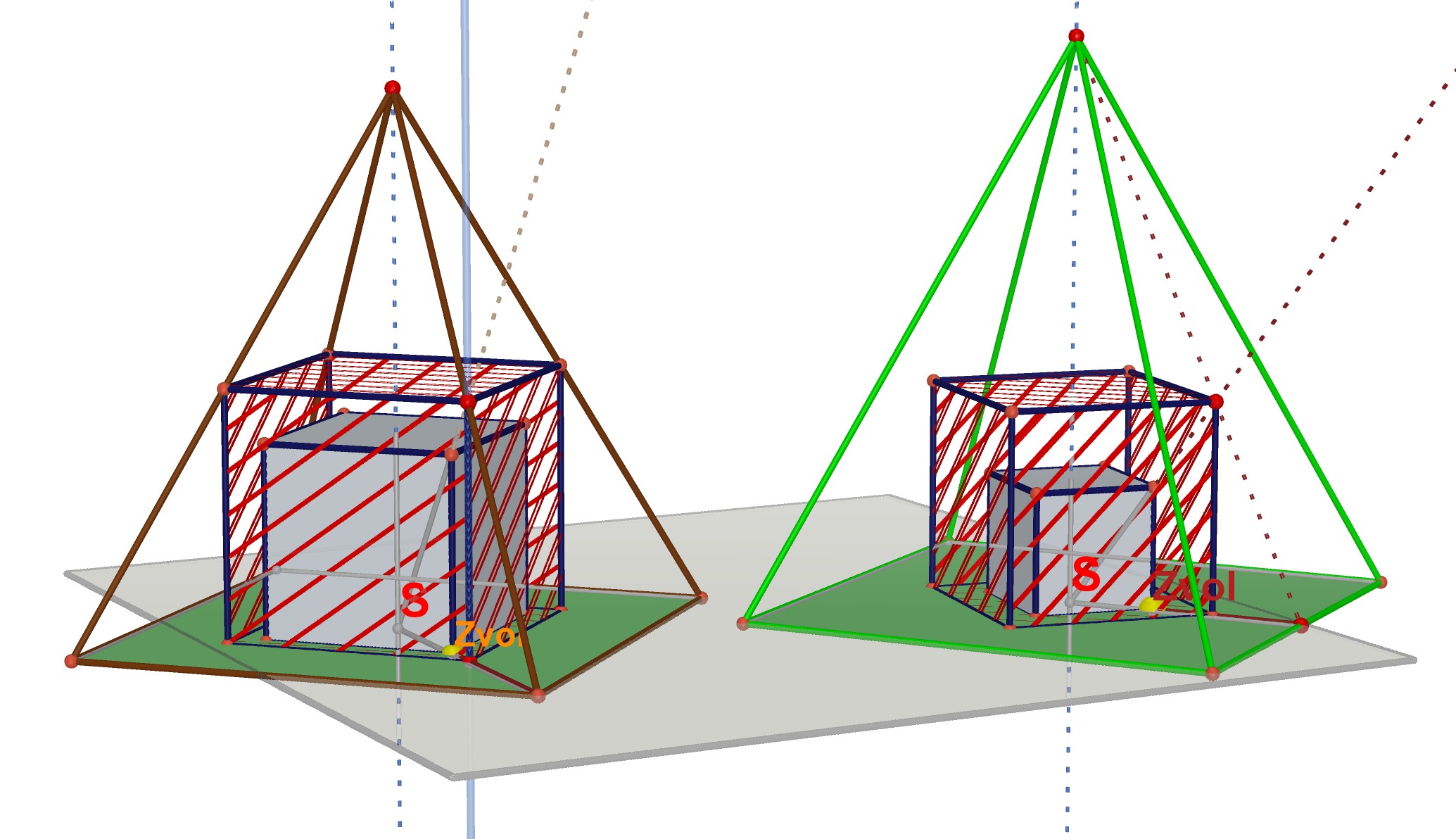
Úlohy z podkapitoly 3.6 s čísly 6, 7
Z planimetrie známe sadu úloh, v nichž máme sestrojit všechny kružnice dotýkající se daných kružnic, přímek či procházející danými body – tzv. Apolloniovy úlohy. Je jich 10, některé z nich – ty snadné – patří mezi běžné konstrukční úlohy v rovině, řešení jiných vyžaduje znalosti nad rámec základního učiva. Zobecněním Apolloniových úloh do prostoru dostaneme úlohy o konstrukci kulové plochy s požadovaným dotykem. Takových úloh je 15 a věnujeme jim samostatnou podkapitolu 6.3. Zde uvedeme jen některé speciální, jednodušší z nich. První dvě výše uvedené mezi ně patří, 5 je kulová plocha určená čtyřmi nekomplanárními body a taková existuje vždy jediná. Formulace Úlohy 6 je zúžením úlohy žádající sestrojit všechny kulové plochy, které se dotýkají čtyř daných rovin. Tato úloha má až osm řešení, protože ke každé dvojici rovin existují dvě roviny souměrnosti – viz Úloha 1. Úplné řešení není ani tak obtížné, jako zdlouhavé a nepřehledné. I sama scéna, v níž už jsou kulové plochy sestrojeny, je nepřehledná (plochy a roviny se zakrývají) a nepohodlná na manipulaci. V modelu osmkouli jsou roviny ve speciální poloze a je dobře vidět všechna řešení, model osm obsahuje řešení obecné, ale je opravdu nepřehledný.
Snazší variantou Apolloniových úloh jsou úlohy Pappovy (přesněji: jejich prostorové analogie), v nichž je jedním z určujících prvků vždy bod a ten navíc leží na jedné dané ploše. Plocha s bodem dotyku už vymezuje množinu středů hledaných ploch na jedinou přímku a k určení úlohy chybí jen jeden další objekt – bod, rovina nebo kulová plocha.
Pro řešení následujících úloh si všimněme, že podmínka dané roviny s bodem dotyku je ekvivalentní s podmínkou dané kulové plochy s bodem dotyku. V bodě dotyku kulové plochy můžeme jednoznačně sestrojit její (a společnou) tečnou rovinu.
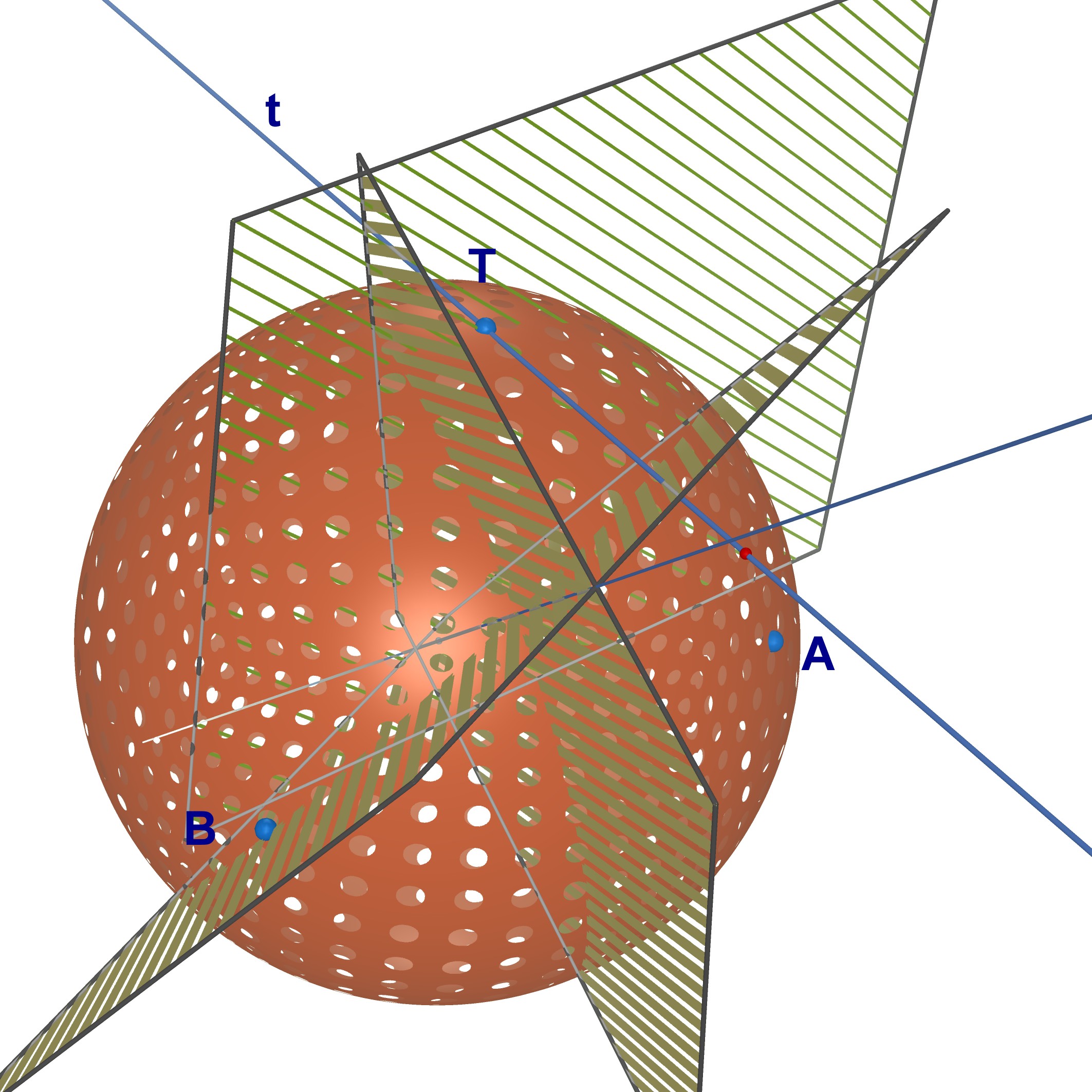
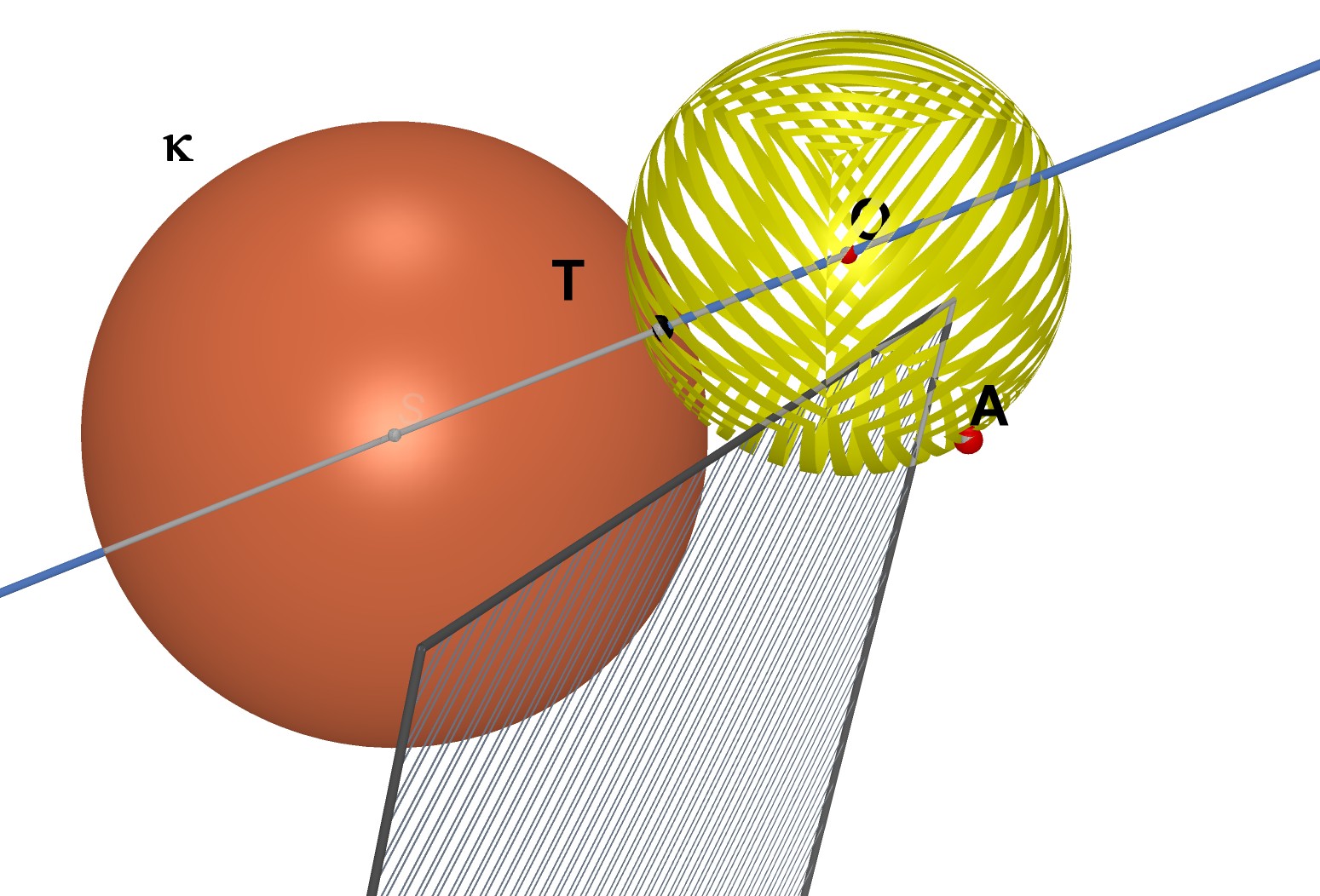
Řešení: Protože střed hledané kulové plochy leží na spojnici středu plochy λ s bodem dotyku (nebo na kolmici k dané rovině α), hledáme pro sestrojení středu ještě další útvar. Tím je rovina souměrnosti bodů T, A. Neleží-li bod A v tečné rovině, existuje vždy jediné řešení. Pokud v ní leží, přechází hledaná kulová plocha v samotnou tečnou rovinu a její střed v bod dotyku. (modely pap1a, pap1b a obrázky 4.11, 4.12)
Figure 4.11: Příklad 8
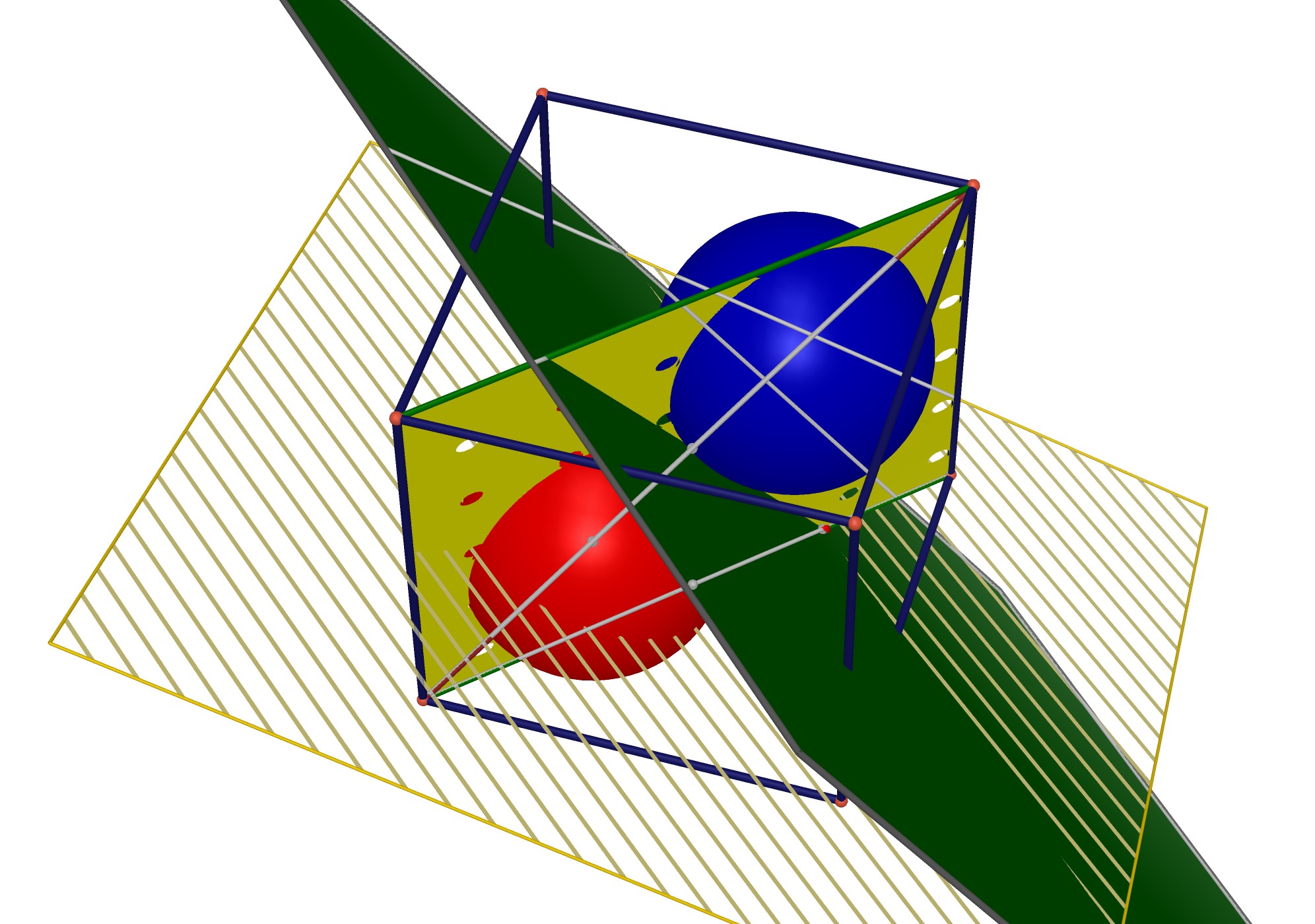
Poznámka: Dvojice daných rovin má dvě roviny souměrnosti a proto má úloha dvě řešení – modely pap2, pap2a2, obr. 4.13. Lze řešit i stejnolehlostí – model pap2ahom.
Řešení: Připomeneme si nejprve řešení analogické planimetrické úlohy: sestrojte dotýkající se kružnici, je-li dána kružnice a přímka nebo kružnice s bodem dotyku. Vedeme-li totiž středem kulové plochy a bodem dotyku rovinu kolmou k dané rovině (či procházející středem druhé dané kulové plochy), můžeme v této rovině řešit zmíněnou planimetrickou úlohu. Získané středy kružnic jsou středy hledaných kulových ploch. Nebo můžeme přímo v prostoru provádět analogické konstrukce ke konstrukcím rovinným. Způsobů řešení je více, v modelu pap3hom je provedena konstrukce s využitím stejnolehlosti, v modelu pap3dil kostrukce s využitím dilatace – tedy převedení úlohy na konstrukci kulové plochy procházející středem dané kulové plochy (kulovou plochu o poloměru r nahradíme bodem) a druhé plochy, která je oproti původně zadané posunutá či zmenšená/zvětšená (pro vnitřní/vnější dotyk výsledné kulové plochy) o zmíněný poloměr r.
Máme-li sestrojit kulovou plochu dotýkající se dané kulové plochy λ v jejím daném bodě T a další kulové plochy κ, můžeme také využít poznatku, že spojnice bodů dotyku každé tečné kulové plochy se dvěma danými kulovými plochami λ1, λ2 prochází některým středem stejnolehlosti λ1, λ2 (modely pap4, pap4a). Tvrzení plyne z podobnosti rovnoramenných trojúhelníků a jde o jinou formulaci uvedeného řešení stejnolehlostí.
V rovinných úvahách a konstrukcích běžně využíváme známé množiny bodů dané vlastnosti, například osu úsečky, osu úhlu, kružnici,…Ukažme a sestrojme si jejich prostorové analogie. Některé jsou zařazeny mezi přímými nástroji systémů dynamické geometrie:
Další množiny sestrojíme v následujících úlohách a příkladech. Ke každé úloze je třeba dokázat, že jde skutečně o množinu všech bodů, tedy že každý bod výsledného objektu požadovanou vlastnost má a žádný bod prostoru, který na výsledném objektu neleží, ji nemá. Vizuální ověření není důkaz a žáci to musí dobře chápat – jen tehdy můžeme pro názornost použít experimentální ověření požadované vlastnosti u náhodného (pohyblivého) bodu sestrojeného útvaru.
Poznámka 1: Sestrojte obě roviny souměrnosti dané dvojice různoběžných rovin. Zdůvodněte, že jsou navzájem kolmé.
Poznámka 2: Nezapomeňte na případ dvojice rovnoběžných rovin.
Poznámka 3: Pro důkaz správnosti – v každém kvadrantu zvlášť – použijte bod v příslušné rovině souměrnosti a bod mimo ni, ale v téže rovině rovnoběžné s jednou z daných rovin.
Poznámka 1: Sestrojte obě roviny souměrnosti dané dvojice různoběžných přímek.
Poznámka 2: Jsou-li zadané přímky mimoběžné, je hledanou množinou hyperbolický paraboloid. Úlohu řešíme v kapitole 6.2, úloha 3. Zde můžeme vyřešit snazší příklad:
Řešení: Zvolme nejprve libovolný pevný bod A ∈ a. Hledanou množinou středů takových úseček je jedna přímka b′ rovnoběžná s b (viz Poznámku 2 v Úloze 5). Navíc zřejmě platí, že proložíme-li touto přímkou rovinu α rovnoběžnou s přímkou a, mají přímky a, b od roviny α stejnou vzdálenost. Každá taková přímka b′ tedy leží v rovině α, která je rovinou souměrnosti nejkratší příčky mimoběžek a, b. Naopak, každým bodem X roviny α můžeme vést příčku daných mimoběžek. Její střed leží v rovině α a pokud by to nebyl zvolený bod X, měla by příčka s rovinou α společné dva různé body, tudíž by v α ležela. To je spor.
Řešení: Problém řešte nejprve jako rovinnou úlohu v jedné rovině vedené bodem A kolmo k rovině α. V této rovině je hledanou množinou bodů stejně vzdálených od bodu A a od přímky a – průsečnice zvolené roviny s rovinou α – parabola, jejíž osa je kolmice k vedená bodem A kolmo k a (a tedy k⊥α). Výsledná plocha vznikne rotací tohoto řešení okolo přímky k, je to rotační paraboloid s osou k.
Poznámka 1: Obdobné řešení jako v příkladu 4 v rovině kolmé k přímce a vedené bodem A. Výsledek: válcová parabolická plocha.
Poznámka 2: Uvedená úloha je zřejmě zcela odlišná od úlohy: Určete množinu, kterou vyplní všechny středy úseček, jejichž jeden krajní bod je bod A a druhý krajní bod probíhá danou přímku a. Tato úloha je rovinná, řešením je přímka a′∥ a, která je obrazem přímky a ve stejnolehlosti se středem A a s koeficientem 1/2.
Poznámka 1: Úlohu nejprve řešte v rovině kolmé k dané rovině – buď rovnoběžné s danou přímkou nebo kolmou k dané přímce.
Poznámka 2: Porovnejte výsledek s výsledkem úlohy 5.
Poznámka 1: Úlohu řešte podobně jako Příklad 4.
Poznámka 2: Je-li přímka a různoběžná s rovinou α, ale není k ní kolmá, je řešením kosý válec. Úlohu řešíme v části 6.2, úloha 4.
Figure 4.14: Úloha 5
Poznámka: Hledané body jsou středy kulových ploch procházejících danými body A, B, C.
Poznámka: Kolmice ke každé přímce p leží v rovině kolmé (k přímce p), proto jsou paty kolmic k přímkám p z bodu B i patami kolmic z jeho kolmého průmětu do roviny ρ, v níž p leží. (model thal1, obr. 4.18, zdroj [13])
Figure 4.19: Úloha 12
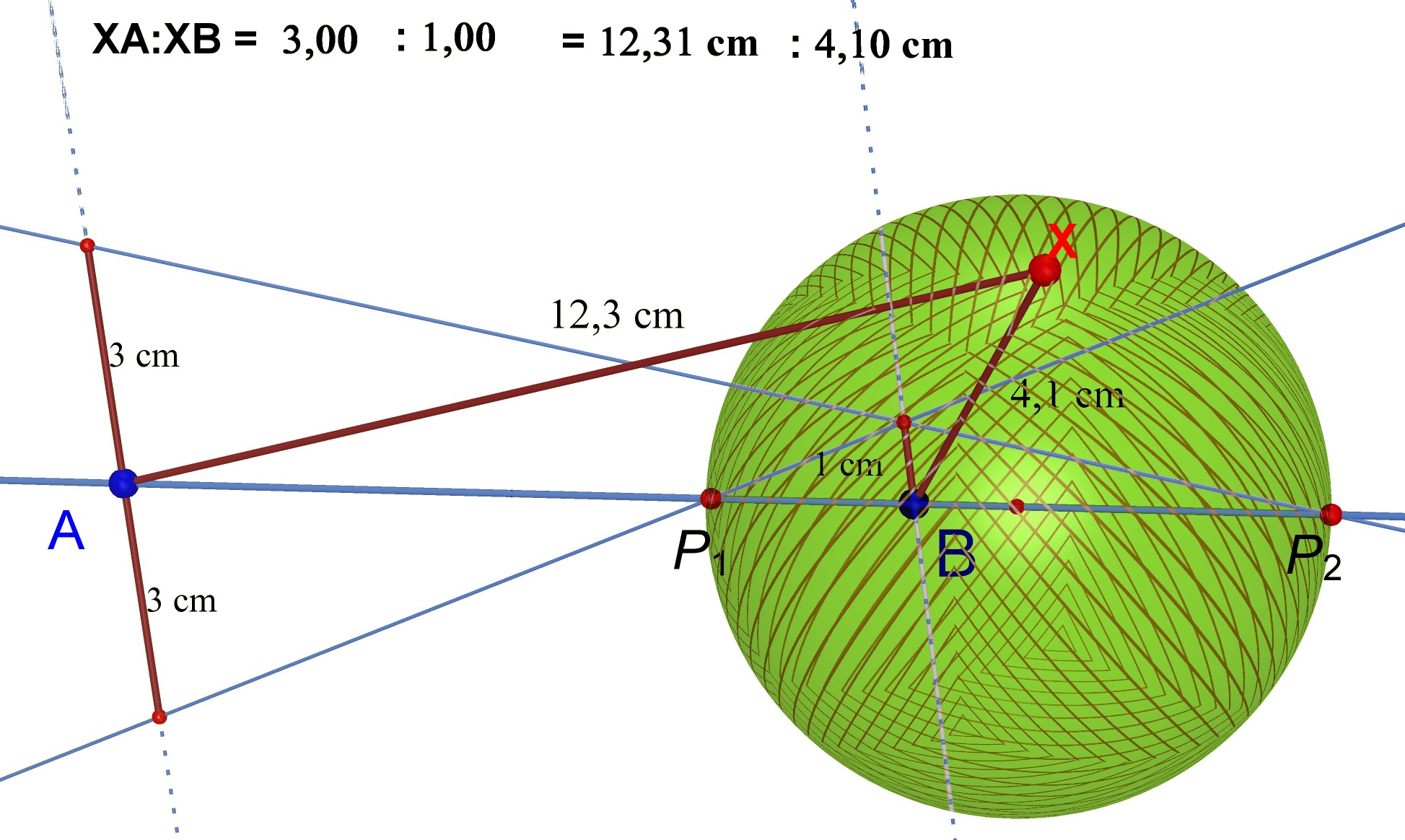
Poznámka: Jde o prostorové zobecnění Apolloniovy kružnice, postup konstrukce vidíme na obrázcích 4.19, 4.20.
Další množiny bodů dané vlastnosti, jejichž konstrukce je obtížnější nebo vyžaduje další znalosti, najdete v Kapitole 6, podkapitole 6.2.
Poznámka: Úloha má nekonečně mnoho řešení. Jednoznačně je určena pouze kružnice k plochy. Vyzkoušejte pohyb bodem B v modelu valecdo2.
Řešení: Vrchol plochy je daný průsečík přímek V. Hledáme nějakou kružnici na ploše (v modelu podstavnou kružnici ohraničené plochy). Určíme ji trojicí bodů, které leží na daných přímkách a mají od vrcholu stejnou vzdálenost. Viz též [17].
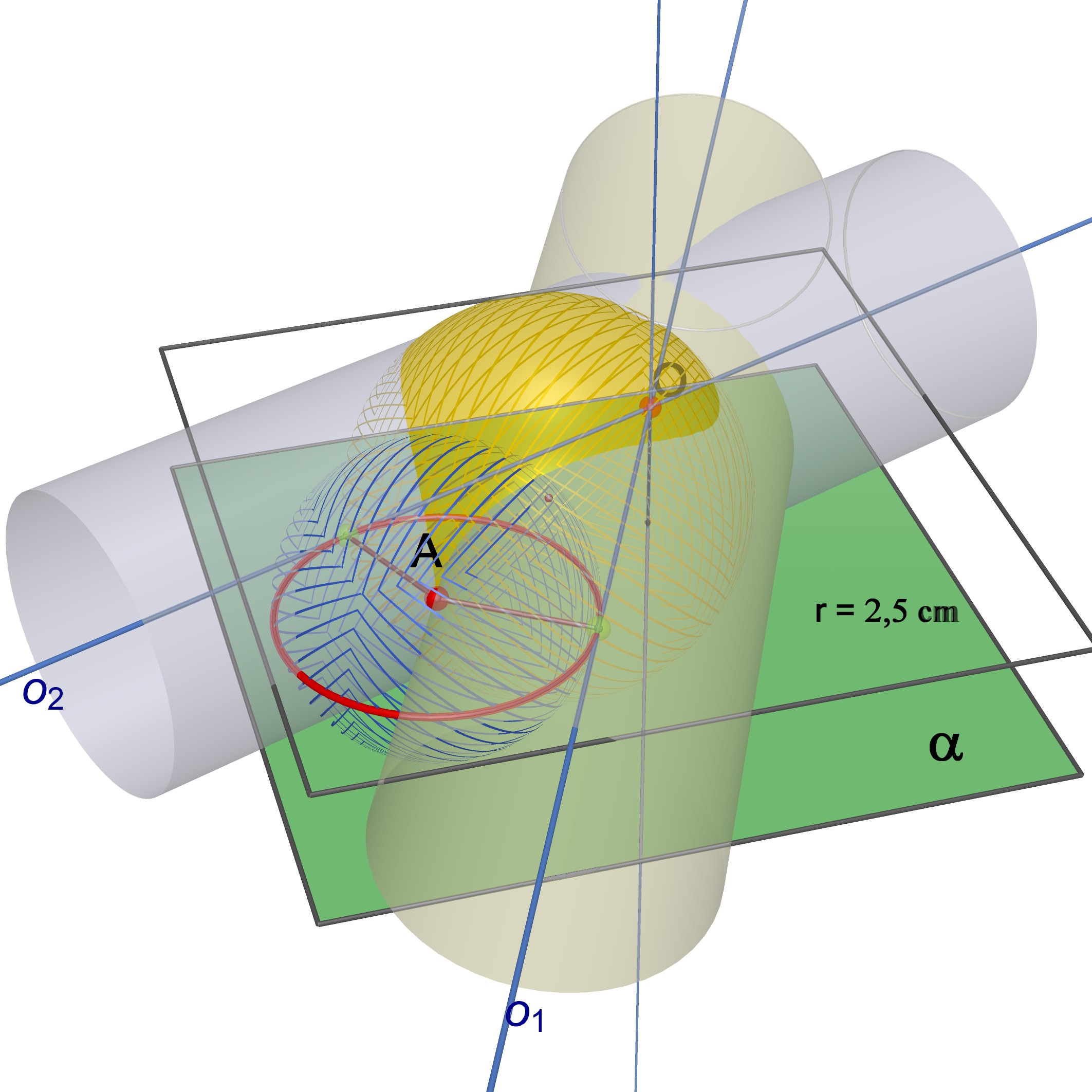
Figure 4.21: Úloha 4
Poznámka: Uvedeme diskusi. Vzdálenost bodu O od roviny α udává poloměr r válcové plochy. Bod A leží na válcové ploše a proto je jeho vzdálenost od hledané osy válce rovna také r. Úloha má řešení pouze tehdy, leží-li oba dané body O, A ve stejné polorovině vyťaté rovinou α a kulová plocha nad průměrem OA protíná průsečnici roviny rovnoběžné s α vedené bodem O s kulovou plochou o středu A a poloměru r.
Řešení: Bod dotyku plášťů dané plochy β a hledané válcové plochy leží na nejkratší příčce mimoběžek o1, o2. Je to ten bod průniku nejkratší příčky s pláštěm β, který je vnitřním bodem příčky (chápané jako úsečka). Počet řešení závisí na poloze o2 vůči dané válcové ploše β. Je-li vzdálenost daných mimoběžek menší než poloměr plochy β, úloha nemá řešení. Je-li mu rovna, plocha má nulový poloměr, řešení neexistuje také. Jinak má úloha jediné řešení.
Poznámka: Obdoba: Sestrojte rotační válcovou plochu, která má osu v dané přímce o a dotýká se dané mimoběžné přímky a.